让智能机器人灵活自如地工作,少一些“违和感”,触觉传感器起着至关重要的作用。近日,厦门大学航空航天学院周伟教授团队在柔性触觉传感器研究领域取得重要进展,提出可以实现超灵敏高频动态力检测的柔性触觉传感器新工作模式,突破传统传感器灵敏度的理论极限值。这意味着,借助该传感器,机器人操作灵巧度将大幅提升,相关研究成果发表在《自然·通讯》上。
机器人倒水如何实现?接触杯子、开始倒水、判断接水量、接几分满、送到指定位置、放下杯子……这些再平常不过的步骤对智能机器人而言却是个考验。当一款柔性传感器贴附于机器人手臂时,机器人整个倒水的动态过程都被精确地检测到,使它做出连贯流畅的类人操作。这样的场景在周伟团队的实验室反复验证多次。
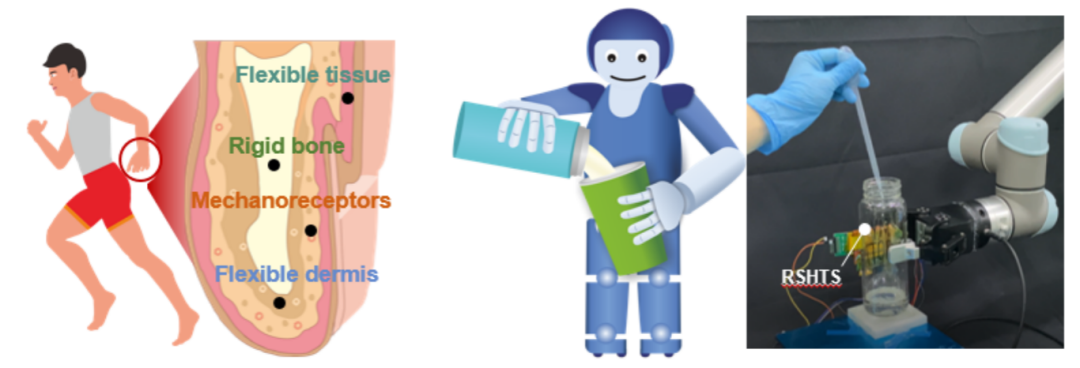
团队提出的仿生型“刚柔并济”柔性触觉传感器原理及实验。厦门大学供图
周伟介绍,触觉传感器相当于智能机器人的“皮肤”,起着接收指令的重要作用,是执行精准操作的前提,传感器越灵敏,类人操作就越灵巧。目前在智能机器人动态力检测应用中常使用的压电式柔性触觉传感器受限于自身灵敏度理论极限值,智能机器人通过“皮肤”接收指令并执行操作的灵巧度并不如人意。为此,团队长期致力于研究灵敏度更高、类人感知的传感器。
研究人员受节肢动物结构组成的启发,提出构造一种仿生型柔性触觉传感器,能精确感知外界作用力大小和方向,实现超灵敏高频动态力检测。柔性的基体加上刚性的微结构,这一研究的关键在于利用新材料构建出这种类节肢动物“刚柔并济”的结构。
团队成员厦门大学航空航天学院机电工程系博士后张金惠介绍,团队两年来化身“材料专家”以及“排列组合专家”,一直在环氧树脂、石蜡、聚二甲基硅氧烷、硅胶等材料中摸索,反复寻找最佳组合方案,最终摸索出完美融合的“刚柔并济”结构。这一成果为智能机器人“皮肤”提供了全新的工作模式,大大提升了智能机器人“皮肤”的灵敏度。
该研究提出的这种仿生型“刚柔并济”柔性触觉传感器,不仅提升了柔性材料的力传递效率,而且颠覆了传统压电式柔性触觉传感器的工作模式,使传感器灵敏度可达到理论极限值的17倍,并具有5−600Hz宽带宽、0.009−4.3N线性检测范围和实时力方向识别的优异性能。
研究人员介绍,该成果为压电式触觉传感器的深入研究提供了新方法和新思路,尤其是对智能机器人建立类人的触觉感知系统具有重要的理论研究价值和意义。“未来,该触觉传感器不仅适用于智能机器人,也有望在医疗、汽车、可穿戴设备等领域进行运用。”周伟说。
(责任编辑:韩梦晨)